Our focus
In order to maximize the societal impact of our research activities, we conduct mission-driven practical research. Our focus points are classified into five research lines: three specialization research line, where we mainly focus on specific technology level, and two integration research line, where we focus on system level.
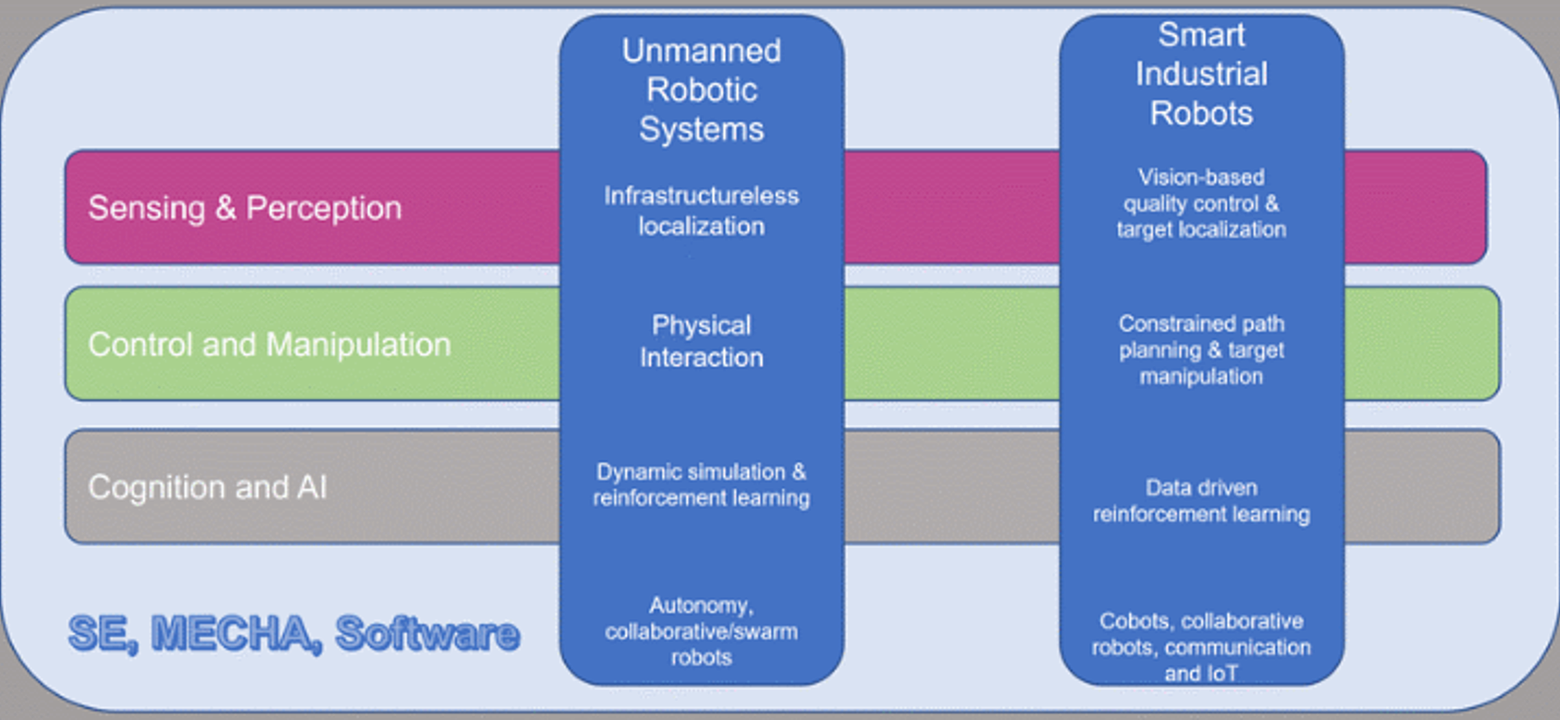
Sensing & Perception
Sensing and perception are very dominant technologies to enable autonomous applications. We mainly focus on developing skills in different industrial domains such as navigation, inspection, controlling, detection and decision making. The strategic goal is to enrich knowledge on the latest and most sophisticated sensors with relevant integration processes such as calibration, synchronization and interfacing to create practical and scientific experiences to interpret and analyze the sensory data using computer vision, signal processing and machine learning technologies. We aim then to robustify the automation and execution processes by fusing different interpretation outcomes to maintain redundancy and modality of autonomous systems.
Cognition & AI
We focus on the implementation of available AI algorithms in dynamic simulation, 3d vision, and data-driven reinforcement learning to do cognitive tasks in robotics. We use the state-of-the-art machine learning, deep learning, and reinforcement learning methods to optimize, improve and robustify the perceptions, manipulation, and physical interaction abilities in our robotic technologies.
Control & Manipulation
We focus on developing intrinsically safe interaction controllers, constrained path planning, and target manipulation for interactive tasks in dynamic and unstructured environments. We develop energy efficient, fault tolerant and high performance controllers that exploit the dynamic properties of the robotic systems and their working environments to provide a safe interaction between robots and humans in real-world scenarios.
Unmanned Robotic Systems
We focus in this stream on the full autonomous navigation and interaction of robots including localization, mapping, path planning, self-awareness and reinforcement learning. We ultimately aim to master and utilize these techniques for implementing reliable platforms and frameworks for enabling collaboration between robots to achieve different tasks regardless of environmental, weather and operational conditions. Strategically, we achieve this demand by accumulating knowledge to build various modules that smoothly and gradually developed through aligning projects with the regional companies using different robotics platforms, drones, wheeled robots, robodogs and autonomous vehicles.
Smart Industrial Robots
We study how robotization and flexible production systems together with robots can increase human efficiency in the machine building and smart manufacturing industry. We focus on cobots, collaborative robots, communication and IoT to integrate different robot hardware and software technologies to achieve flexibility in the manufacturing process.