MARIO
The invention of mobile robots, of which ground robots are the prime examples, has significantly changed the way humans see and use robots. Classic industrial robots are often, if not always, grounded and completely isolated from the direct reach of human workers. Mobile robots, on the other hand, can essentially operate in an unlimited workspace, which has led to the intention to use mobile robots in potential applications traditionally reserved for humans only, such as service applications (e.g. plant inspection) and home applications (e.g. physical assist) of disabled people).
Research question
Is it possible to realize an intelligent feeding robot that is able to carry out a safe and autonomous mission, even in unknown indoor / outdoor environment of the farm, in which dynamic obstacles exist and are moving?
Nowadays there are even mobile robot platforms that can, for example, collect and dispose of objects. These robots can potentially be used for healthcare and logistics.
project Approach
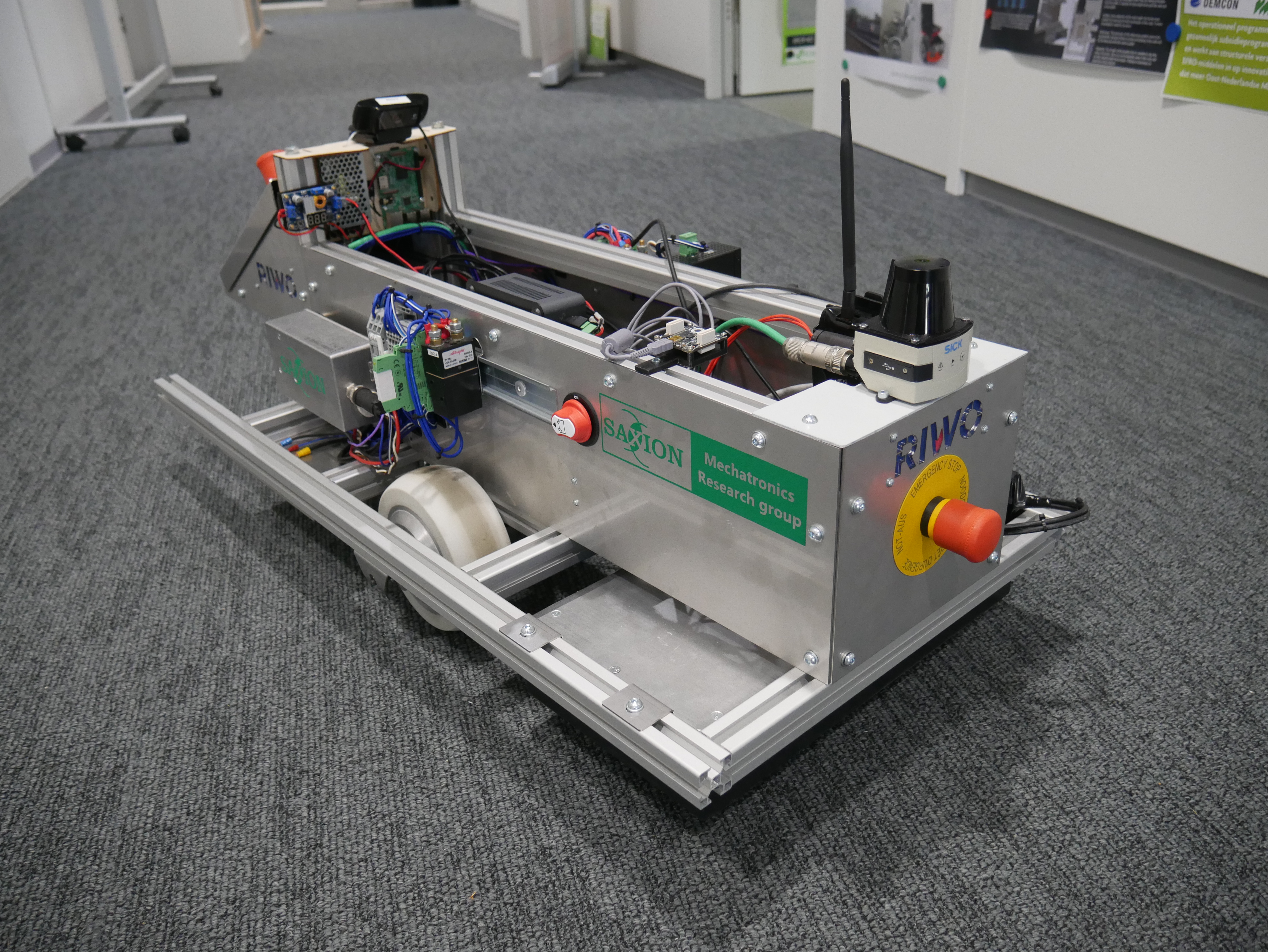
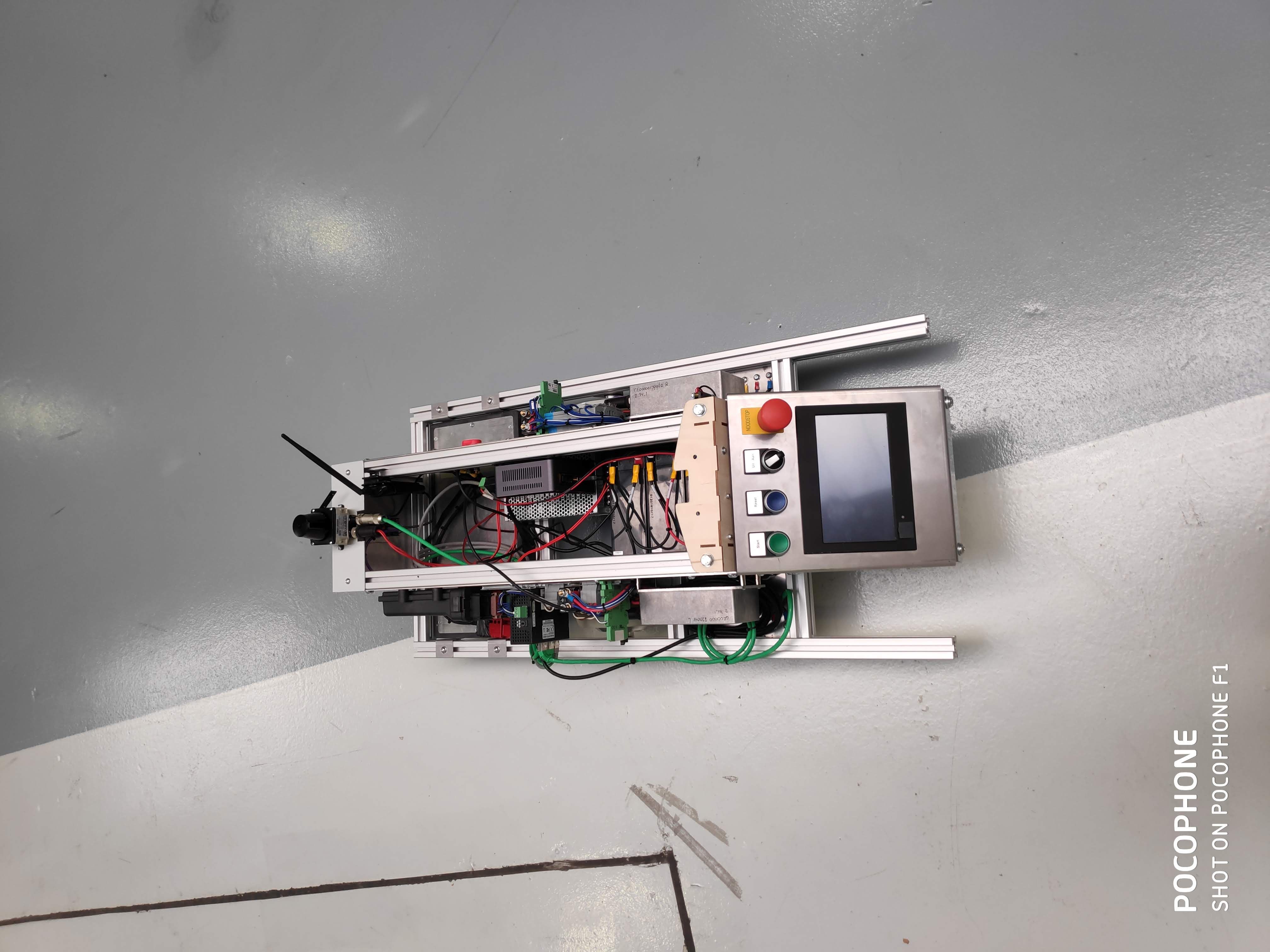
As part of various (inter) national projects, such as R5COP2 and Medical Robotics, the Research Group Mechatronics of Saxion University of Applied Sciences has developed autonomous ground robot. This robot can navigate autonomously and safely in known, partially known and completely unknown within environments. This robot has been realized using a systematic approach where the modularity of the system (both hardware + software) is essential to extend the functionality and facilitate the reusability of the developed modules in other platforms and in other applications. While these results are promising, preliminary testing has shown that further development is needed to reuse the developed modules for true industrial grade applications. The professorship together we want to further develop the basic module with Riwo Engineering to prepare it for truly industrial applications.
project Goal
MARIO - Modular Adaptive Robot for Intelligent operations - is a collaborative project between Riwo Engineering B.V. and Research Group Mechatronics at Saxion University of Applied Sciences, and it is supported by TechForFuture . The main goal of this project is the development of an intelligent feeding robot that is capable of carrying out its mission autonomously in indoor as well as outdoor environments in robust manner while self-adapting to various environmental changes.
Technology areas:
- Modular Autonomous Navigation of Industrial Platform
- Robust and Accurate Mapping and Localization in indoor/outdoor environment
- Cooperative Robotics
Duration project
Start project: 01-01-2018 - End project: 01-02-2021
Partners

RIWO Engineering
Website
Tech for Future
websiteTValley
Website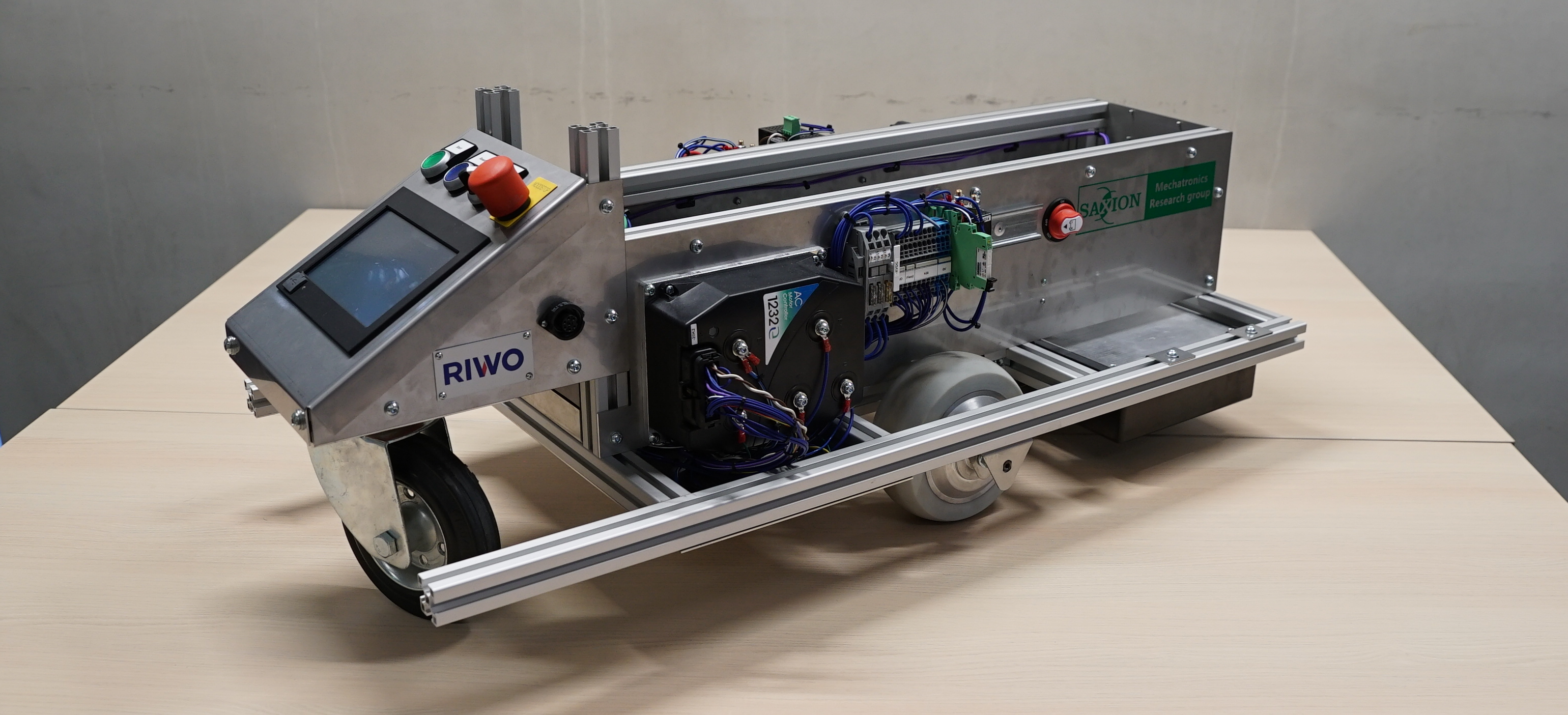

More information about the project?
