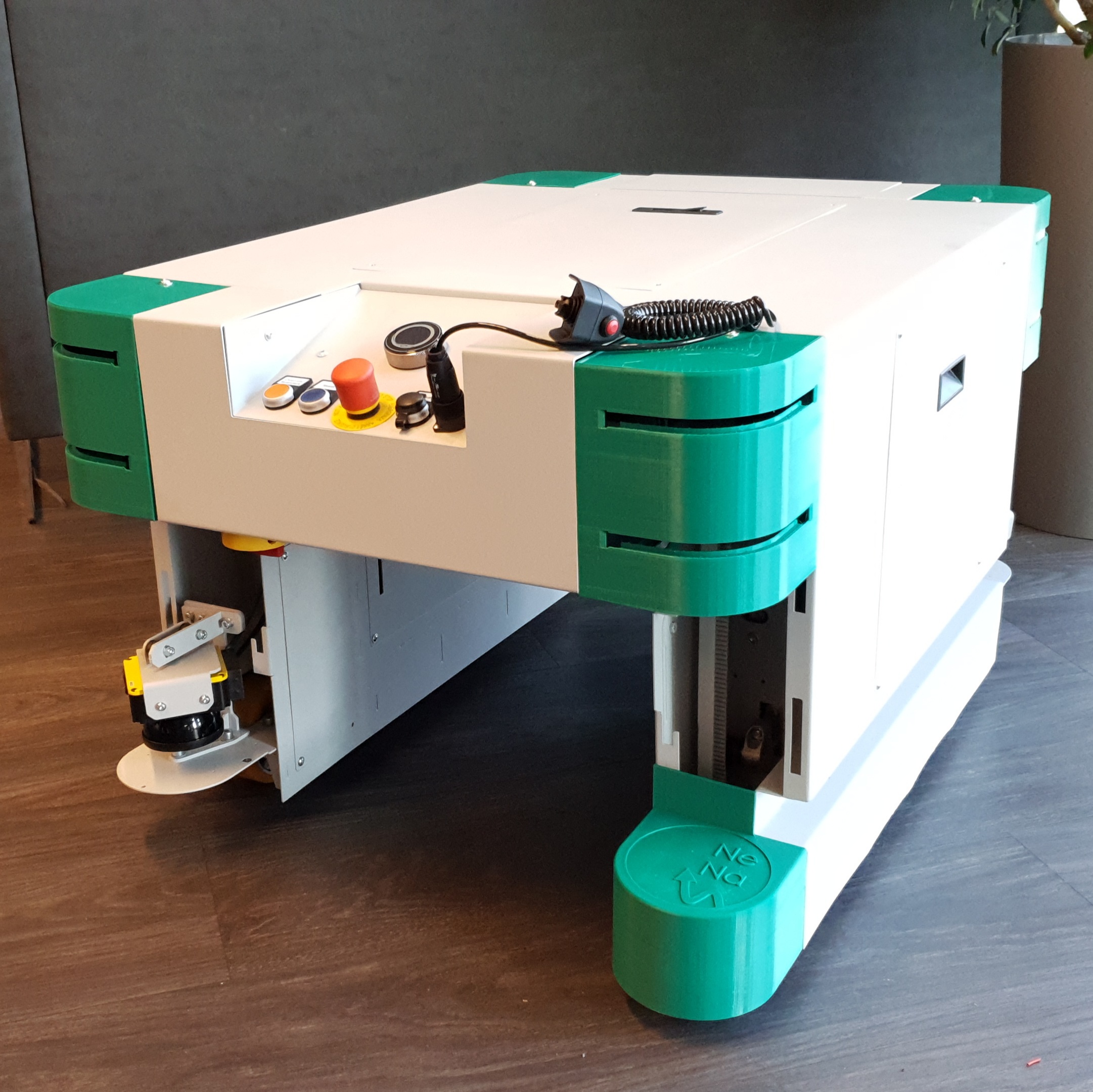
Next Generation Navigation (NeNa)
Autonomous self-driving robots are applied in precision farming, health care and industry. Traditionally, these robots follow external, installed infrastructure, such as induction wires or RFID tags in the floor. These techniques have certain drawbacks. There is a growing demand for industrial robots that can perform different tasks.
Research question
How can we develop, using existing open source solutions, accurate, robust, reliable and safe autonomous navigation for industrial ground robots so that it works with fleet management software?
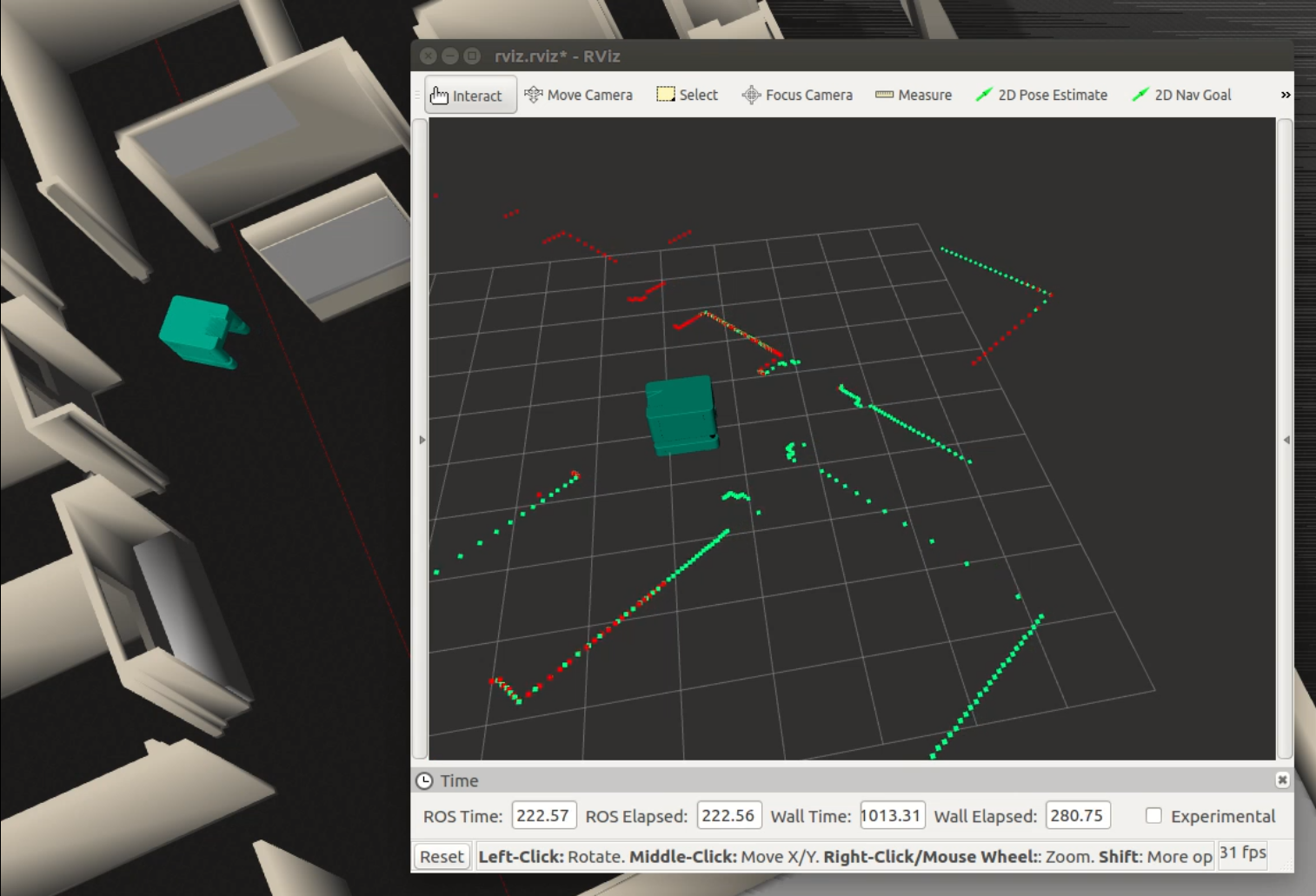
The last years, we have seen the development of systems that can navigate based on laser scanners and maps of the environment. However, these solutions do not always handle changing environments or big areas. Moreover, these solutions are closed source, so it is costly to make changes to the system.
Project approach
Accordingly, there is a demand for practical knowledge on autonomous mobile robots, that do not rely on external infrastructure. The robots should be able to adapt to different circumstances. It must be able to navigate autonomously and safely in areas with people and other robots. The consortium partners in the project want to work on an open solution, that can be applied to their own hardware. They aim for open solutions. The solutions should be adaptable for new environments.
The development of stable, safe and autonomous mobile robot is a challenging task. The solution requires state of the art sensors to generate an image of the environment. Localization, planning, and navigation require complex algorithms that SMEs can't develop in house. It is important to investigate the applicability of open source solutions.
In this project, the consortium partners will gain practical knowledge and experience through the research and joint development of a robot that can navigate safely, robustly and accurately autonomously, without dependencies on external installed infrastructure. The study prototype will remain available at Saxion for follow-up studies. As a result, Dutch business will be at the forefront of and benefit from the expected explosive growth in the market for autonomous robots.
Research outcome
The Next Generation Navigation project is part of the autonomous systems research line of the Mechatronics research group. We build on the knowledge that was developed in the TFF project Medical Robotics, in the European project R5 Cop, in the TFF project SLAMming and in the TFF project MARIO. The previous project focused on smaller robots. In NeNa we further develop the knowledge and apply it to an industrial robot platform. The project develops practical knowledge and experience by collaboratively developing a robot test platform. After the project, the platform can be used to test other sensor systems for autonomous navigation.
Duration project
Start project: 01-02-2019 - End project: 31-01-2021
Partners

DEMCON
Website
RIWO Engineering
WebsiteHencon
WebsiteSinga
WebsiteHollander Techniek
Website
More information about the project?
